Research
Research
研究プロジェクト
触覚の原理、主観性を基軸に、基礎から応用まで幅広く研究を展開しています。
触知覚メカニズムと触感デザイン
ヒトの皮下組織の構造や触覚メカニズムに関する研究を行っています。
また、錯触(触覚の錯覚)の知覚メカニズムに基づいた触感デザイン研究を行っています。

柔らかさ設計マッピング

皮膚構造を模した触覚センサ

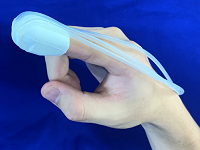
触覚感度調整ネイルチップ
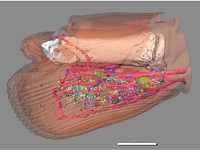
サル指構造の3次元構築と解析

皮膚振動データを用いた個体識別

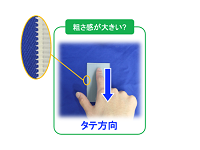
厚さ知覚バイアスの解析
なぞり動作と粗さ感との関係
触覚共有による協働作業・共創
触覚情報を共有することによる人―人/人―ロボットの協働作業や共創に関する研究を行っています。
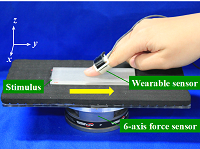
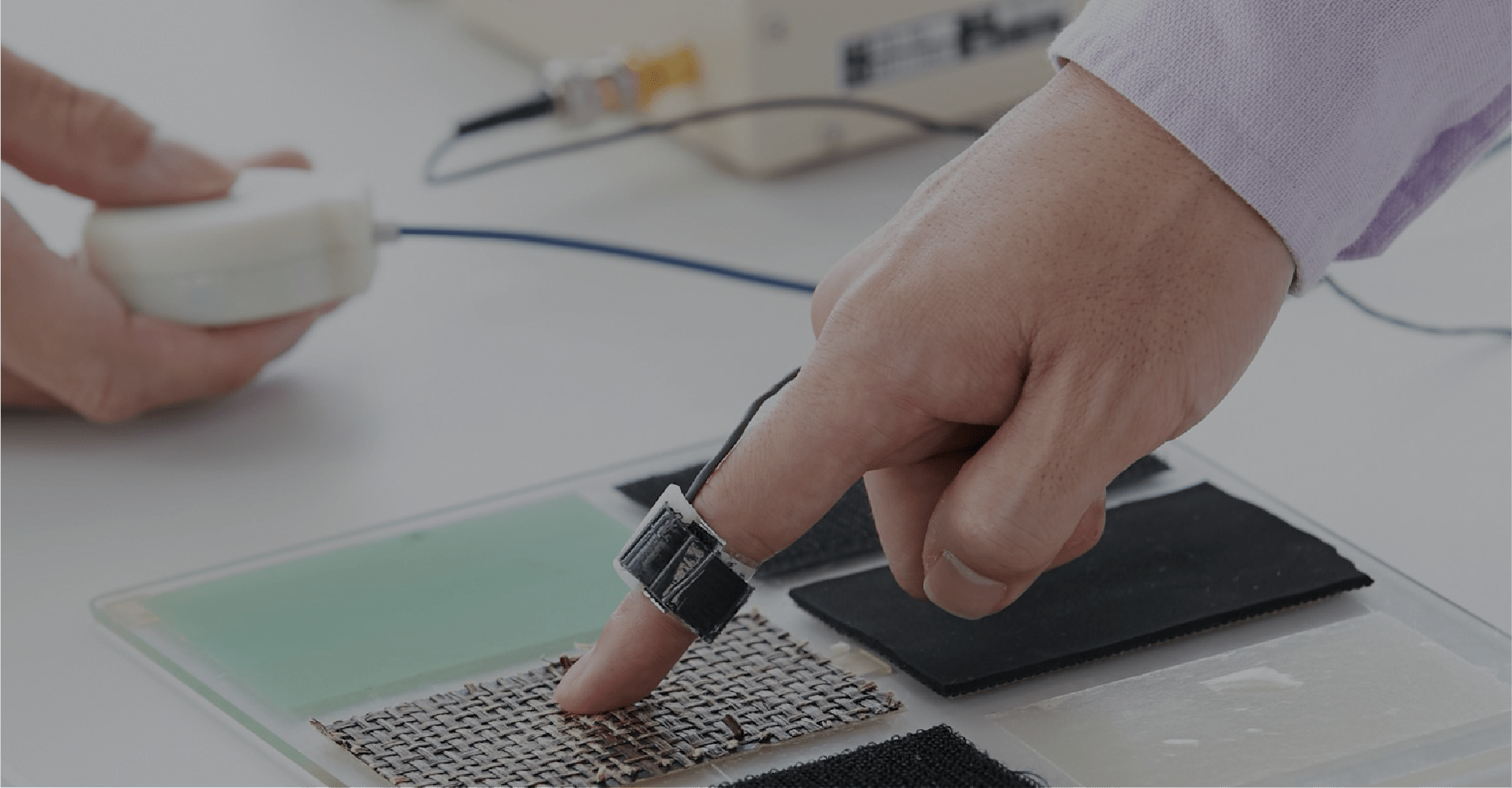
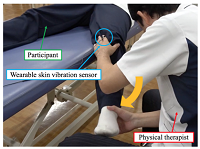
ウェアラブル皮膚振動センサ

粗さ知覚における皮膚振動の寄与

触覚伝達の無人称化

触感評価のための人工指

触覚情報の共有による人-ロボット協働システム

人-ロボットの双方向の触覚伝送
触覚的スキル・経験の活用、伝承、獲得
触診の情報化や定量化の技術、触覚情報を伝送技術に関する研究を行っています。
高度な技能、豊富な経験をもつ人の能力を、触覚情報の共有によって活用することを目的としています。
触覚センサを用いた拘縮触診の情報化

鉗子型触覚センサ

触覚把持鉗子

触覚付き装飾義手

触覚情報提示を用いた腹腔鏡下触診システム
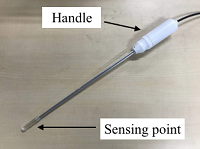
内視鏡下手術用硬さセンサ
内診用硬さセンサ

触覚共有を利用した技能獲得